

智能手機攝像頭用量提升的趨勢仍處于加速態(tài)勢,特別是3D攝像頭等新創(chuàng)新的使用也將為手機攝像頭領(lǐng)域提供增益。3D攝像趨勢所致,高端手機勢必成為標(biāo)配。3D攝像搭載3D感應(yīng)、建模、structure light 、TOF軟體算法。



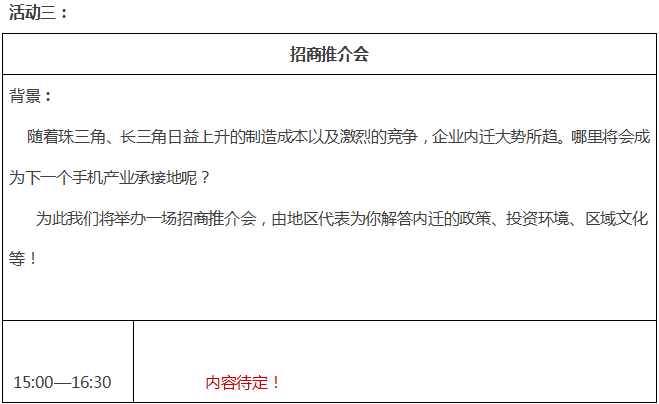

 活動火熱報名中......
活動火熱報名中......
Real time 3D depth & capture
3D 攝像在手機硬件技術(shù)structure light 和 TOF,3D攝像搭載軟體算法可實現(xiàn)避障,3D攝像提供一種基于TOF技術(shù)的紅外避障方案,單芯片同時能夠精準(zhǔn)測距、3D圖形構(gòu)建、手勢識別。距離遠、精度高、延遲少。3D攝像structure light 和 TOF在檢測距離上、精度、檢測速度上相差不大,區(qū)別在于:結(jié)構(gòu)光方案優(yōu)勢在于技術(shù)成熟,深度圖像分辨率可以做得比較高,但容易受光照影響,室外環(huán)境基本不能使用;而TOF方案抗干擾性能好,視角更寬,不足是深度圖像分辨率較低。
TOF
即Time ON Fly,利用紅外光在空氣中的飛行時間,算出距離物體距離。
TOF測距距離遠,精度高,相比超聲波測距優(yōu)勢很大,同時多點感應(yīng)的TOF芯片,比如8*8=64點感應(yīng)的,更精確的有240*320的,可以實現(xiàn)構(gòu)建物體3D模型,應(yīng)用非常廣,比如掃描房間輪廓,構(gòu)建地圖、識別手勢,比目前常用手勢識別IC智能識別上下左右前后等更靈活。
TOF測距原理
利用紅外光在空氣中的飛行時間,算出距離物體距離
Stucture light
Stucture light是3D掃描的一個光學(xué)方法,它投射出一組用數(shù)學(xué)方法構(gòu)造的光圖形,按照一定順序照亮被測量的物體。一個到投影儀的距離已知的攝像頭同步捕捉一組被照亮物體的圖像。相對于用于校準(zhǔn)的平面基準(zhǔn)表面,攝像頭看到的圖形被經(jīng)掃描物體的表面形狀所扭曲。幾何三角剖分的原理使得計算被掃描物體表面上每個點的XYZ坐標(biāo)成為可能(見圖)。然后,獲得的點云數(shù)據(jù)用于被掃描物體表面詳細3D模型的計算構(gòu)造
Stucture light原理
3D掃描的一個光學(xué)方法,它投射出一組用數(shù)學(xué)方法構(gòu)造的光圖形,按照一定順序照亮被測量的物體
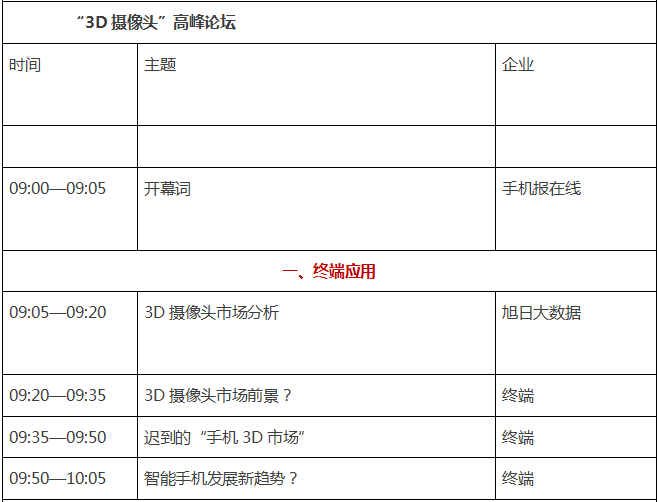
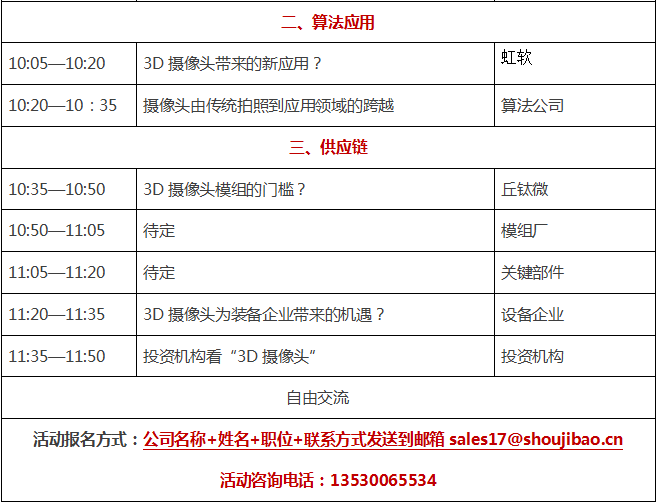
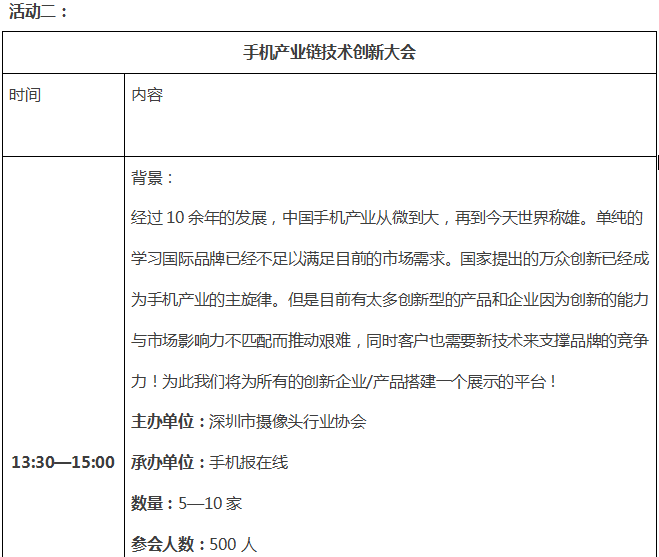
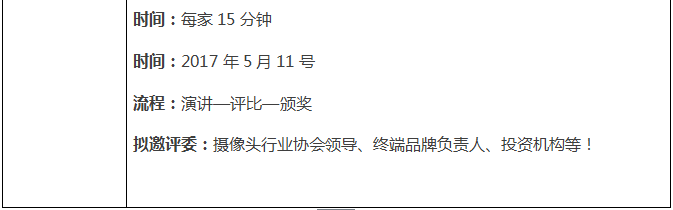
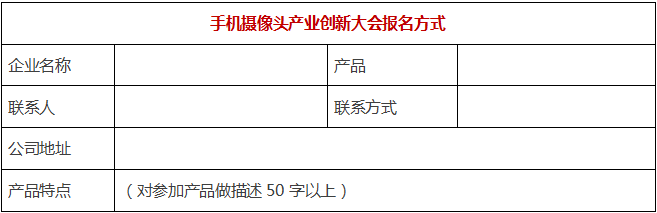
為全方位、深層次加強在智能終端3D攝像頭領(lǐng)域的交流合作,更大力度匯聚創(chuàng)新資源,加快打造只能終端產(chǎn)業(yè)集群,進一步夯實攝像頭資源共享為基礎(chǔ),營造良性發(fā)展的環(huán)境和氛圍。2017年5月11號在深圳舉辦3D攝像高峰論壇
請詳細填寫上述表格發(fā)送至參會郵箱:sales17@shoujibao.cn
咨詢電話:13530065534 毛成
趕緊拿起電話吧!市場需要你!
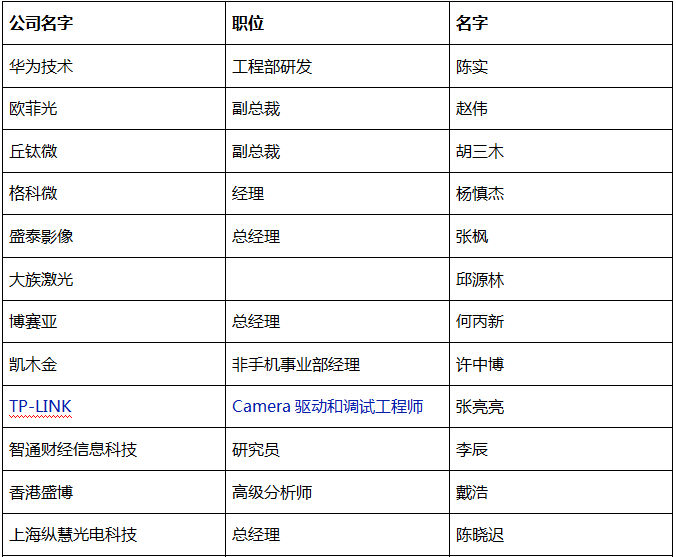
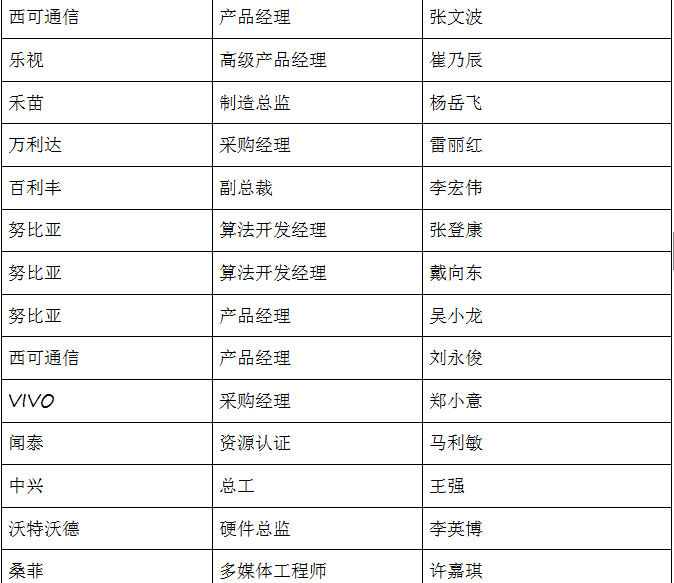
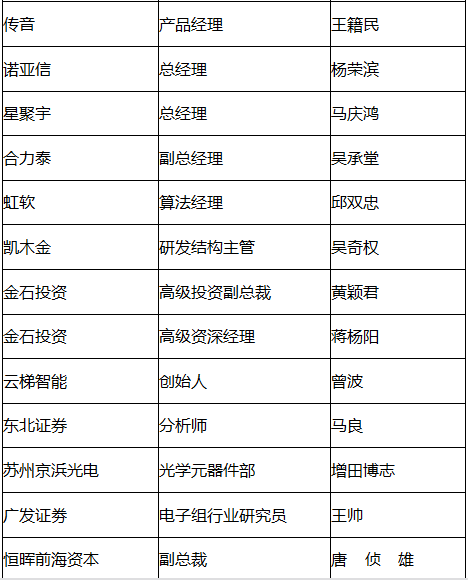
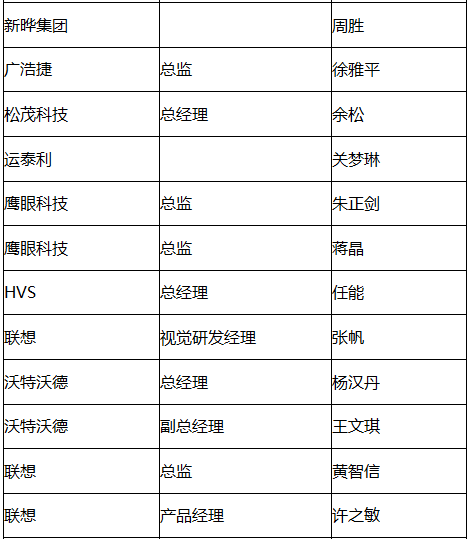
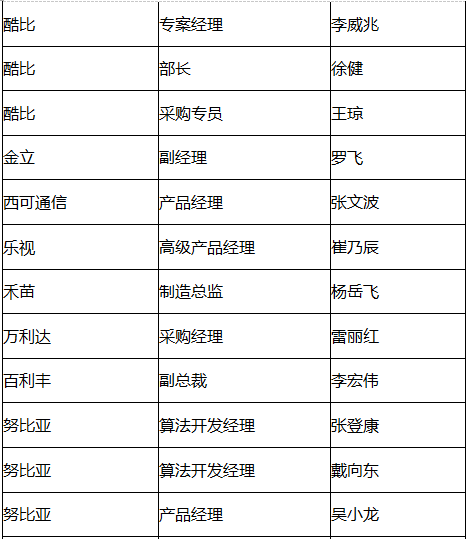
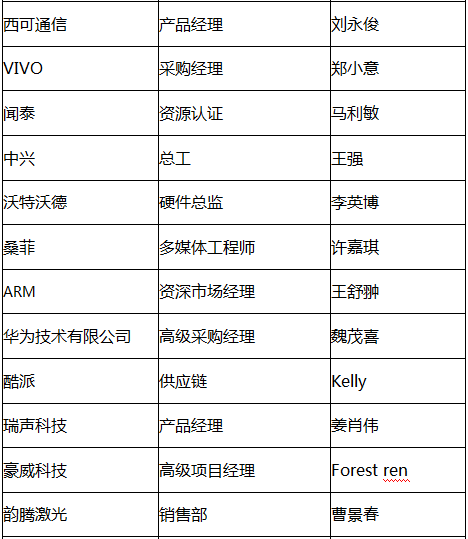
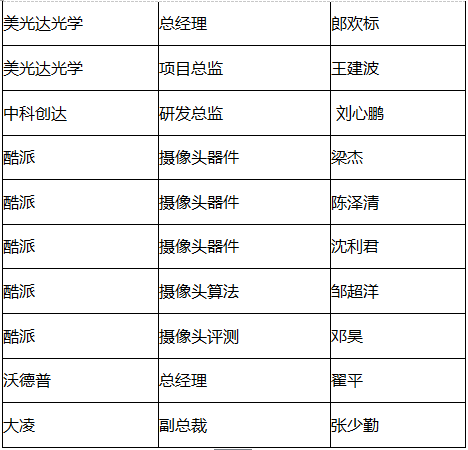
2017年4月最新報名名單






 01月07日 18:14
01月07日 18:14